
关于控制装置
步进电机的扭矩特性
(交流)是指使用 100 VAC 电源的电机驱动器运行时(半步)。
(直流)是指使用 DC+24 V 电源(半步)的电机驱动器运行时的扭矩特性。
(直流)是指使用 DC+24 V 电源(半步)的电机驱动器运行时的扭矩特性。
![PK513PB(交流) 脉冲速度(半步)[pps] PK513(直流) 脉冲速度(半步)[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_01.jpg)
![PK523MB(交流) 脉冲速度(半步)[pps] PK523MB(直流) 脉冲速度(半步)[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_02.jpg)
![PK524MB(交流) 脉冲速度(半步)[pps] PK524MB(直流) 脉冲速度(半步)[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_03.jpg)
![PK525MB(交流) 脉冲速度(半步)[pps] PK525MB(直流) 脉冲速度(半步)[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_04.jpg)
![PK544MB(交流) 脉冲速度(半步)[pps] PK544MB(直流) 脉冲速度(半步)[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_05.jpg)
![C090P-9015P(交流) 脉冲速度(半步)[pps] C090P-9015P(直流) 脉冲速度(半步)[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_06.jpg)
![C087QP-9215P(交流) 脉冲速度(半步)[pps] C087Q-9215P(直流) 脉冲速度(半步)[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_07.jpg)
![PK545-B(交流) 脉冲速度[pps] PK545-B(直流) 脉冲速度[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_08.jpg)
![PK564-B(交流) 脉冲速度[pps] PK564-B(直流) 脉冲速度[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_09.jpg)
![PK566-B(交流) 脉冲速度[pps] PK566-B(直流) 脉冲速度[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_10.jpg)
![PK569-B(交流) 脉冲速度[pps] PK569-B(直流) 脉冲速度[pps] 的图](https://www.kohzuchina.com/wp-content/themes/kohzu/assets/img/technology/control-electronics/img_11.jpg)
需要更改初始设置的型号
需要更改控制器初始设置的型号
我们的标准平台有多种归位方式。因此,即使将标准平台与标准控制器(KOSMOS 系列)组合使用,也有可能需要更改控制器出厂时的初始设置。使用控制器时,请确认平台的传感器系统和使用说明书中的控制器设置。
必须从初始设置和控制器设置中更改归位方式的平台(SYS No.)
| 平台类型 | 阶段类型 | 设置值 (默认设置:4) | 起始方式 |
|---|---|---|---|
| X 级 | XA16F-L2101 (-R) | 1 | 使用区域传感器(基准)。 |
| XA16F-L2201 (-R) | |||
| XA16F-L2301 (-R) | |||
| XA20F-L2401 (-R) | |||
| XA20F-L2501 (-R) | |||
| SXA0530-R01 (-R) | |||
| SXA0750-R01 (-R) | |||
| SXA0775-R01 (-R) | |||
| SXA1075-R01 (-R) | |||
| XY 级 | YA16F-L21101 | 1 | 使用区域传感器(基准)。 |
| YA16F-L22101 | |||
| YA16F-L22201 | |||
| YA16F-L23101 | |||
| YA16F-L23101 | |||
| YA16F-L23301 | |||
| SYA0530-R01 | |||
| SYA0750-R01 | |||
| SYA0775-R01 | |||
| SYA1075-R01 | |||
| Z 级 | ZA04A-W101 | 7 或 8 | 建议采用极限原点法。 |
| ZA10A-32F01 | 1 | 使用区域传感器(基准)。 | |
| ZA16A-32F01 | |||
| 旋转平台 | ZA04A-W101 | 7 或 8 | 推荐使用限位原点法。 |
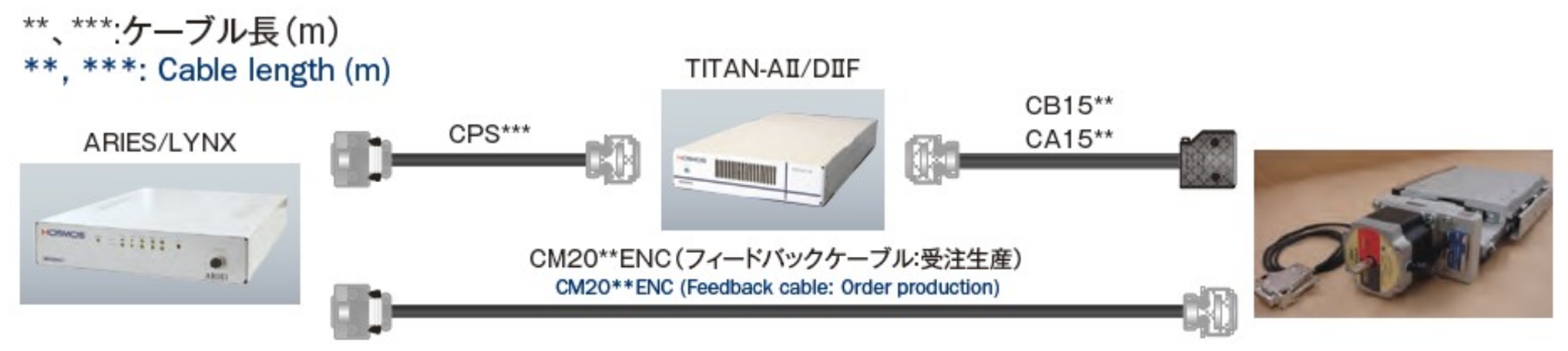
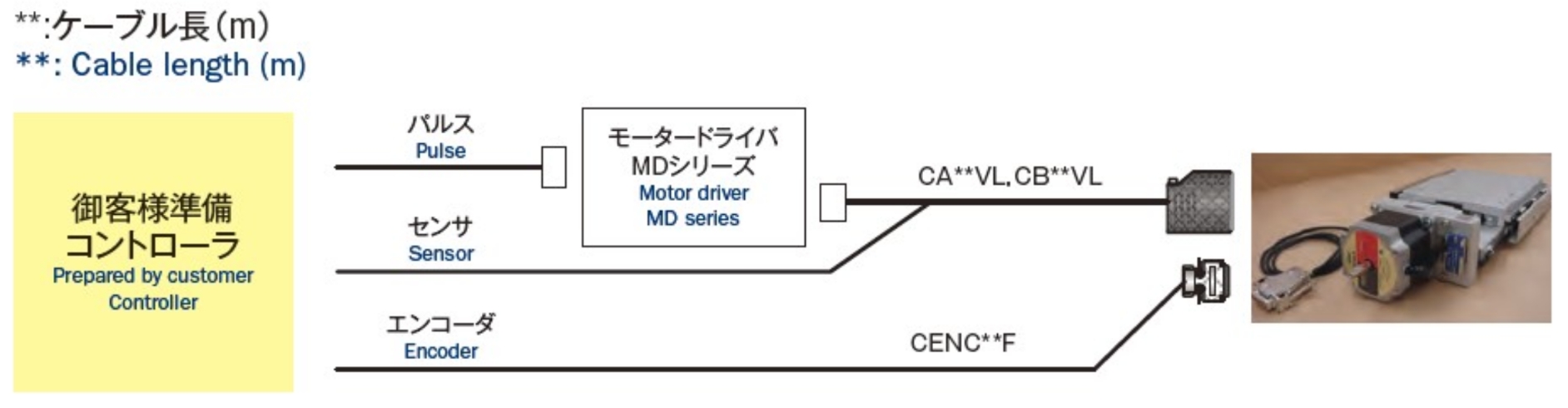
带反馈规格的定位平台的接线
带反馈规格的定位平台(定制)
在万宝龙系列定位平台上安装线性光栅尺可实现更高的定位精度。特别是可以提高丢失运动和重复定位精度。可选配将直线光栅尺的增量信号连接到控制器的反馈电缆。如需更快、更可靠的定位,请联系我们的销售部门。

使用我们的控制器时的系统配置
客户自行准备控制器时的系统配置
常见问题
有关控制器的常见问题。